Drone
橋梁点検支援技術
非GNSS環境対応型ドローンやポールカメラを用いた近接目視点検支援技術
床版下面や橋脚をドローンで点検するには基本的に桁下での飛行となりますが右の写真のように橋梁桁下は
床版や橋脚、樹木等が壁となってGNSS 衛星の信号が届きにくい“非GNSS 環境” となります。
この“非GNSS 環境” でドローンを飛行させる際、GNSS 測位を用いた自律制御で飛行すると
位置情報の誤差や乱れが発生し操縦不能などの危険を伴います。

り、GNSS の位置情報を一切使わず安定した撮影、高精度な画像解析を可能としております。

①搭載した制御用のカメラの動画像から特徴点を検出
②動画像内で移動する特徴点を追跡し、距離を解析
③抽出した特徴点を蓄積し、三次元点群モデルを構築
④三次元点群モデル内での自己位置を推定
非GNSS 環境下でも
自律飛行が可能
技術区分
| 対象部位 | 上部工(桁下面、側面、床版)および下部工(橋脚、橋台) |
|---|---|
| 変状種類 | ひびわれ、漏水・遊離石灰、剥離・鉄筋露出、腐食等 |
運動性能
| 構造物近傍での安定性能 | 前後±0.12m、左右±0.49m、高度±0.10m |
|---|---|
| 運動位置精度 | 水平方向±0.50m、垂直方向±0.50m |
計測性能
| 撮影速度 | 0.5m/sec ~ 1.0m/sec |
|---|---|
| 最小ひびわれ幅 | |
| 幅0.05mm 計測精度0.029mm、幅0.1mm 計測精度0.003mm(日向) 幅0.05mm 計測精度0.029mm、幅0.1mm 計測精度0.000mm(日影) |
|
| 長さ検出精度 | 0.04%(相対誤差) |
| 位置特定精度 | 水平方向 3mm、垂直方向 429mm(絶対誤差) |
点検支援技術性能カタログ検証内容
性能カタログに掲載されている数値は、実橋梁での飛行や模擬ひびわれ板の撮影を行い
(一財)橋梁調査会様立会いの下、精度検証を実施しました。
各性能の検証内容や、その結果については「技術の性能確認シート」に掲載されています。
技術の性能確認シート(当社技術抜粋)
Visual SLAM によるホバリングが外乱(風)の影響をどの程度
受けるかを 検証(検証時、風速2m/s)
●飛行高度と同じ高さに風速計を設置
●飛行ログより移動量を測定

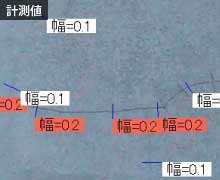
模擬ひびわれ板を実際の点検と同じ距離から撮影し画像解析を
行った結果と実測値を比較


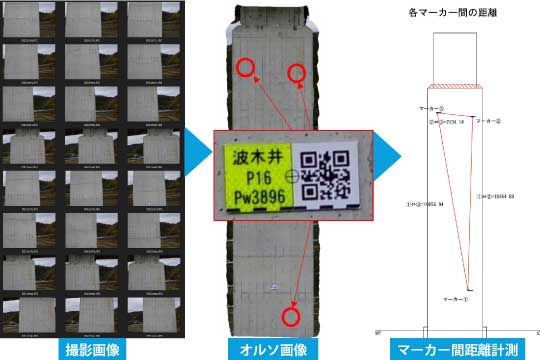
実橋梁にマーカーを3 箇所貼付け、ドローンで撮影し、画像解析に
よりマーカー間の距離、貼付位置を計測した結果を実測値と比較
納品データ例
-
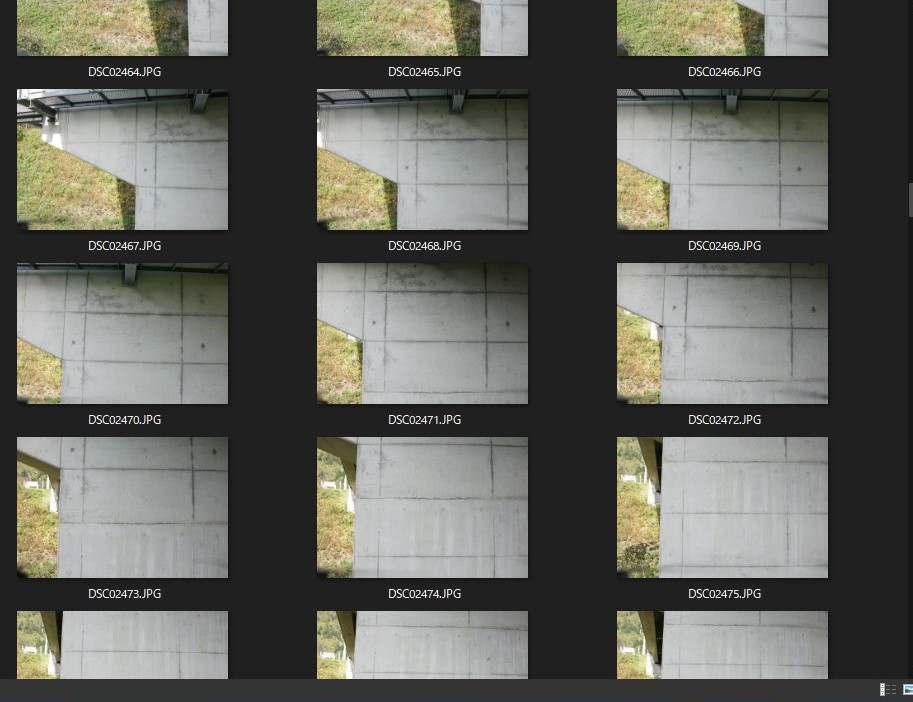
 撮影画像
撮影画像
(ドローンで撮影した画像)
-
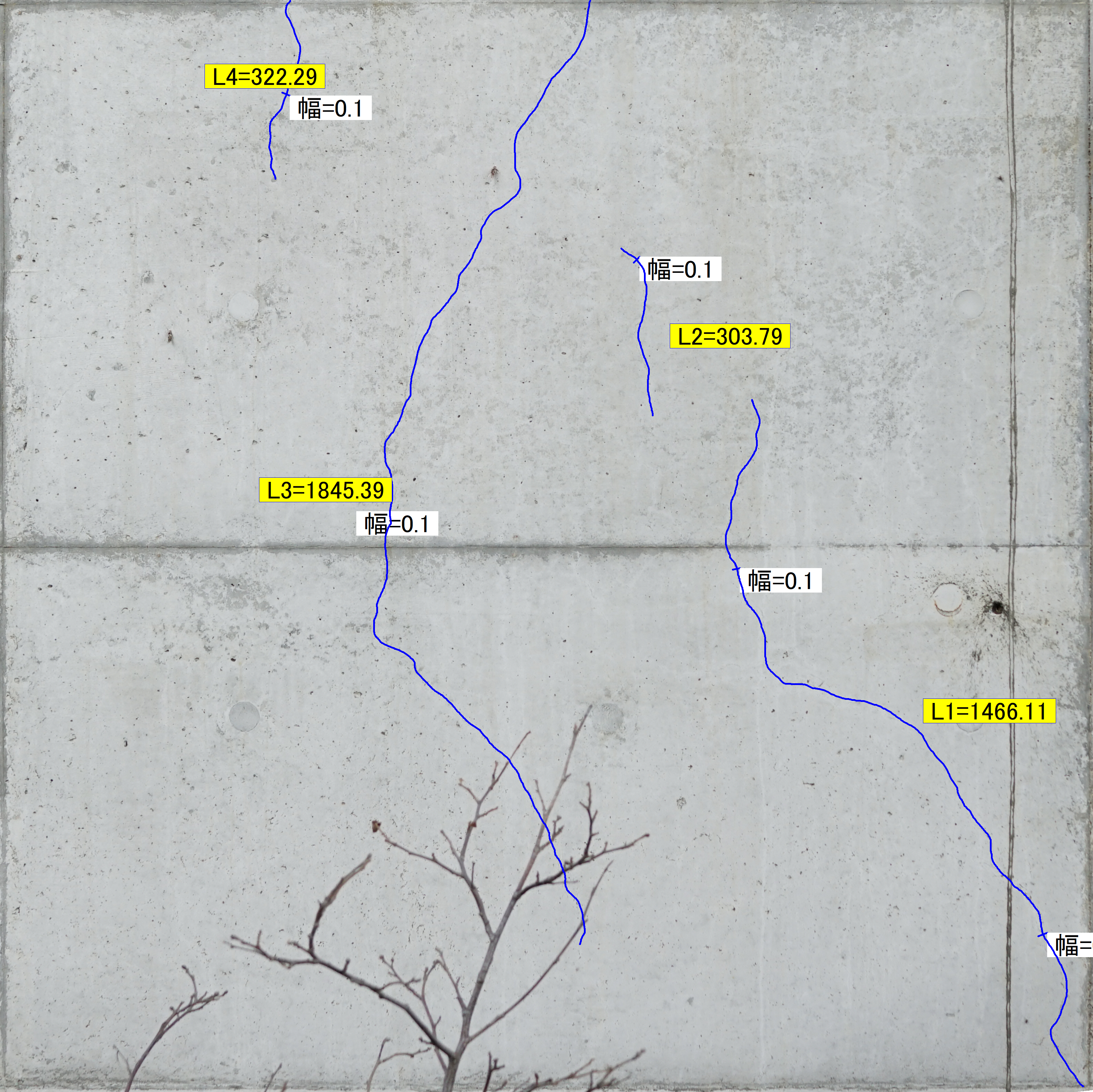
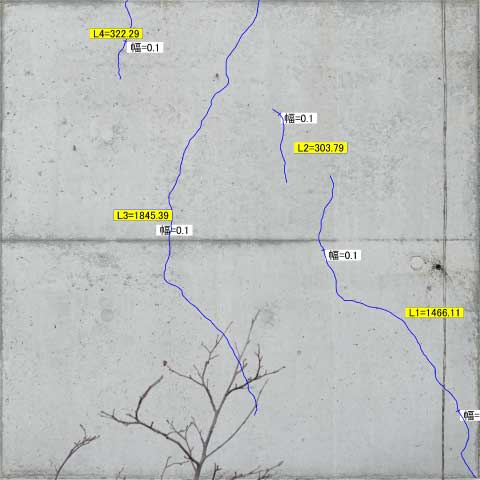 損傷写真
損傷写真
(ひびわれ等の損傷がトレースされた画像) -
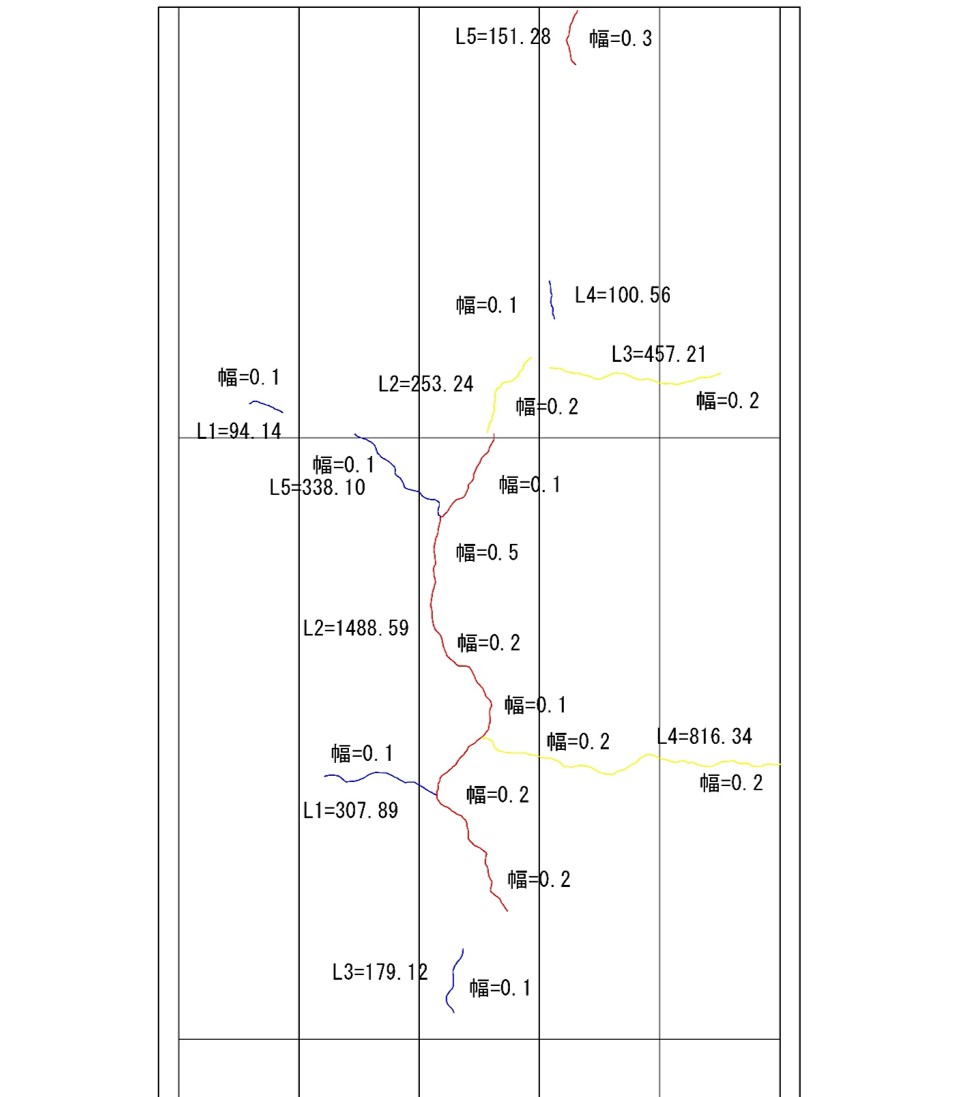 損傷図
損傷図
(CAD 図面)
-
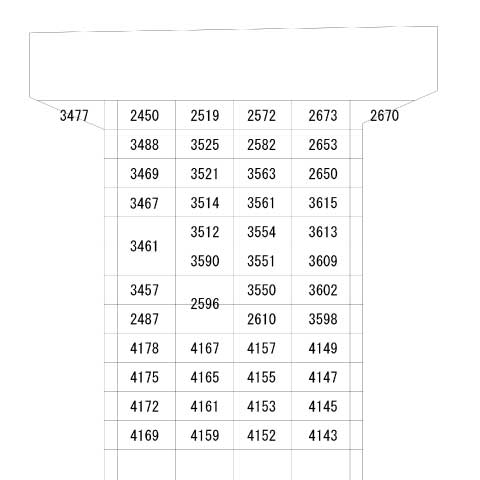 写真配置図
写真配置図
(撮影画像がどこを撮影したかを示した資料) -
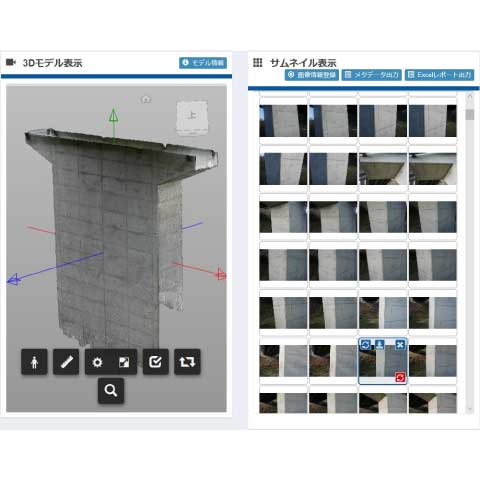 3次元成果品納品にも対応
3次元成果品納品にも対応
(令和元年度2件実施)


業務実績(抜粋)
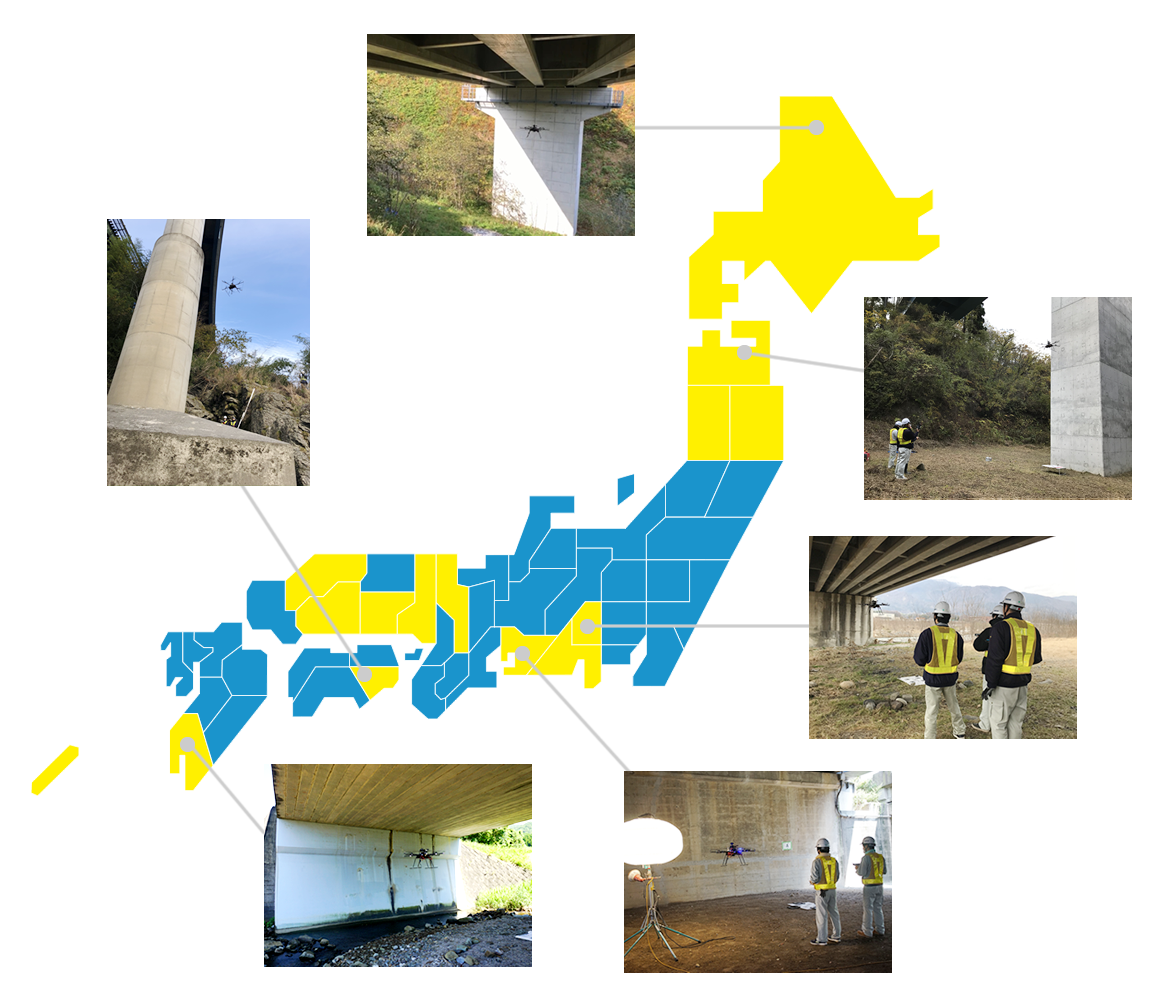
北海道、青森県、秋田県、岩手県、山梨県、静岡県、愛知県、京都府、岡山県、徳島県、鹿児島県、沖縄県、他多数